Research
Aero Research
Robotic hummingbird
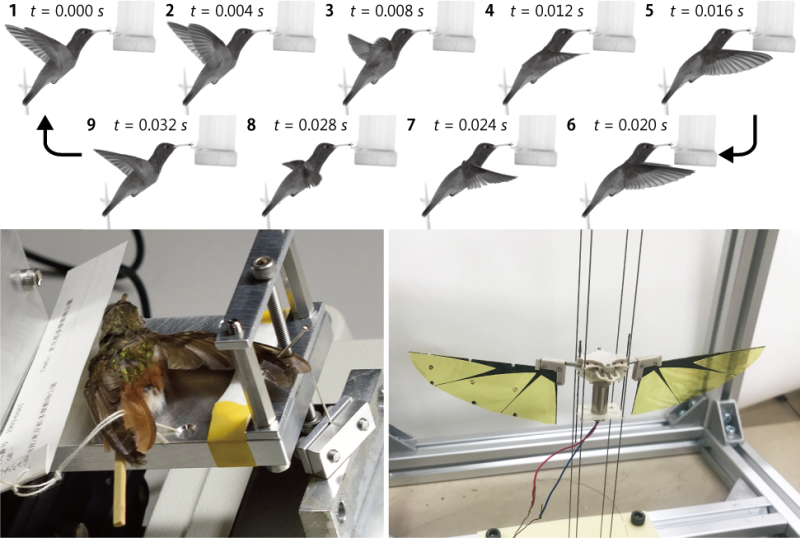
Unlike conventional fixed-wing or rotary-wing aircrafts, wings of small flying animals such as hummingbirds and insects are flexible and operated at relatively low speed with large angle of attack. Hence such animals have a potential to be a model for safer and more silent micro aerial robots. Moreover, their capability of complex wing motions enables abrupt change of aerodynamic force, which leads to the high mobility. In our laboratory, a robotic hummingbird is being developed aiming to implement these biological features into the artificial systems.
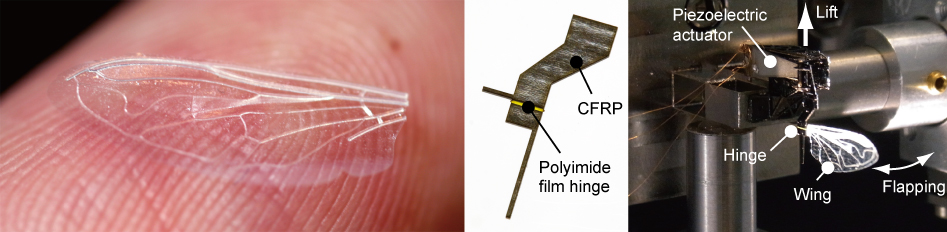
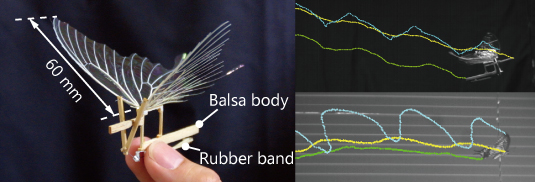
So far, we captured a hovering flight of an Amazilia hummingbird, amazilia amazilia, with four highspeed video cameras to three-dimensionally measure the wing motions and deformation[1]. Based on the measurement, a 1-DOF (degree of freedom) electric flapping mechanism with the same wing size, flapping frequency, and mass as those of the hummingbird was developed. The mechanism achieved vertical takeoff along with vertical guide wires. We are also studying feedback control of wing motion to realize flight control [2].
In particular, we focus on flexural elsticity of flight feathers. In coorperative research with Yamashina Institute for Ornithology, flexural stiffness of fllight feathers of an Amazilia hummingbird sepcimen was measured by static bending test. Based on the obtained stiffness distribution, biomimetic wings consisting of a CFRP frame and a polyimide film were fabricated using a UV-laser cutting tool. Flapping tests using the electric flapping mechanism revealed that the biomimetic wings achieved higher average lift than conventional simple wings without increase in power consumption[3]. Recently, we realized 3-D printed wings implementing torsional spring at the leading edge to promote torsional deformation[4].
[1] M. Maeda, T. Nakata, I. Kitamura, H. Tanaka, and H. Liu, "Quantifying the dynamic wing morphing of hovering hummingbird," Royal Society Open Science, vol. 4, 2017.
[2] J. Dang, H. You, and H. Tanaka, "An experimental study on attitude control of a tailless hummingbird-mimetic flapping-wing robot with defective wings," Advanced Robotics, pp. 1-16, 2024, doi: 10.1080/01691864.2024.2391821.
[3] A. Kawahara, M. Aizawa, T. Yamasaki, and H. Tanaka, "Fabrication of a Hummingbird-mimetic Flexible Flapping Wings " in IEEE 30th 2019 International Symposium on Micro-NanoMechatronics and Human Science (IEEE MHS 2019), Nagoya University, Nagoya, Japan, December 1-4 2019, pp. 138-140.
[4] T. Fujii, J. Dang, and H. Tanaka, "Hummingbird-Bat Hybrid Wing by 3-D Printing," in 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, May 29–June 2 2023, pp. 3404–3410, doi: 10.1109/ICRA48891.2023.10160819.
Aqua Research
3-D motion analysis of wing-propelled swimming of penguins and its application to underwater drones
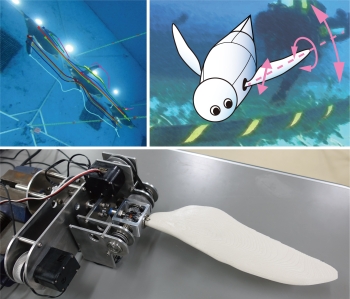
Penguins are agile underwater swimmers. Details of their wing kinematics and swimming maneuvers, however, are not fully understood yet. For the purpose of clarifying the hydrodynamics of the swimming penguins, we measure the 3-D motions of the swimming penguins with multiple underwater video cameras in a large water tank at an aquarium in cooperation with Nagasaki Penguin Aquarium[1, 2]. We are also developing a 3-DoF electric wing mechanism which is capable of the penguin's wing motions. By fully utilizing the 3-DoF wing motion, generation of large force with minimum energy and change of its direction are realized[3, 4]. The mechansim is being used for fluid dynamic experiments in a water tunnel, and, in the future, will be mounted on penguin-mimetic underwater drones.
[1] N. Harada and H. Tanaka, "Kinematic and hydrodynamic analyses of turning manoeuvres in penguins: body banking and wing upstroke generate centripetal force," J. Exp. Biol., vol. 225, no. 24, 2022, doi: 10.1242/jeb.244124.
[2] Natsuki Harada, Takuma Oura, Masateru Maeda, Yayi Shen, Dale M. Kikuchi, and Hiroto Tanaka, "Kinematics and hydrodynamics analyses of swimming penguins: wing bending improves propulsion performance," Vol. 224 (21), jeb242140, 2021, DOI: 10.1242/jeb.242140.
[3] Y. Shen and H. Tanaka, "Experimental analysis of the sweepback angle effect on the thrust generation of a robotic penguin wing," Bioinspiration & Biomimetics, vol. 18, no. 2, 026007, 2023, doi: 10.1088/1748-3190/acb521.
[4] Yayi Shen, Natsuki Harada, Sho Katagiri, and Hiroto Tanaka, "Biomimetic Realization of a Robotic Penguin Wing: Design and Thrust Characteristics," IEEE/ASME Transactions on Mechatronics, 2020.
Biomimetic riblets reducing fluid drag
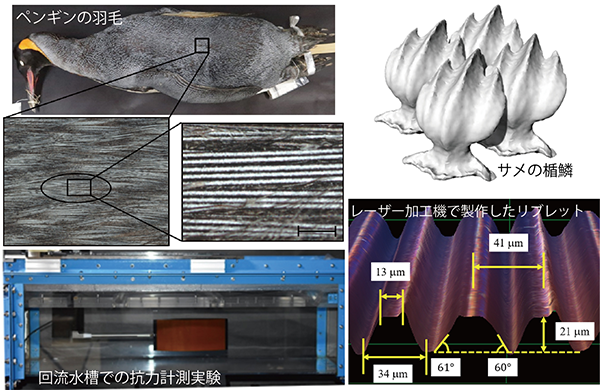
A riblet is a set of fine row-like projections that reduce turbulent frictional drag. Our laboratory studies biomimetic riblets that are robust to changes in flow velocity and direction, based on the morphology of shark scales and penguin feathers. Detailed measurements of the shape of great white shark scales have revealed a relationship between the spacing of scale protrusions and swimming speed [1]. In collaboration with Ricoh Company, Ltd., a three-dimensional shark-scale-mimetic riblets were created using inkjet printing of ultraviolet-cured resin [2]. The fabrication of the penguin-feather-mimetic riblets was realized by grooving the film using UV laser scanning [3]. The fluid drag reduction rate was evaluated by drag force measurement experiments in a circular water tank.
[1] S. Sayama, M. Natsuhara, G. Shinohara, M. Maeda, and H. Tanaka, "Three-dimensional shape of natural riblets in the white shark: relationship between the denticle morphology and swimming speed of sharks," Journal of The Royal Society Interface, vol. 21, no. 217, 20240063, 2024, doi: doi:10.1098/rsif.2024.0063.
[2] S. Sayama, K. Kato, M. Katsuki, Y. Kawashima, T. Kamei, M. Natsuhara, H. Tanaka, "Shark-inspired high-low alternating riblets by inkjet printing of UV-curable ink," in 75th Annual Meeting of the APS Division of Fluid Dynamics (APS DFD 2022), Indianapolis, IN, USA, November 22 2022, U17.01.
[3] R. Saito, T. Yamasaki, and H. Tanaka, "Fluid drag reduction by penguin-mimetic laser-ablated riblets with yaw angles," Bioinspiration & Biomimetics, vol. 17, no. 5, 056010, doi: 10.1088/1748-3190/ac7f71.
Press release: Nature's Design Marvel: How Shark Skin's Denticles Adapt to Wide Speed Range - White sharks and extinct giant megalodons may swim at similar speeds(August 2, 2024)
Past Research
Power estimation of a Pacific white-sided dolphin in rapidly accelerating swimming
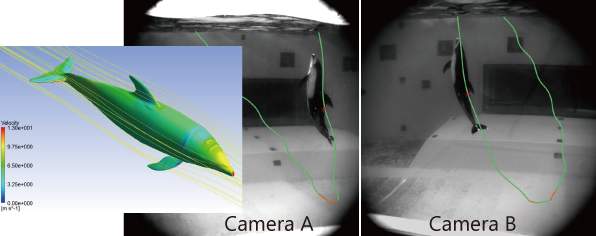
Underwater accelerating swimming of a Pacific white-sided dolphin before the vertical high jumping were measured with a pair of high-speed video cameras. We also estimated fluid dynamic drag acting on the dolphin by CFD simulations based on the measured 3-D shape of the dolphin. By combining the motion analysis and the CFD, the output power of the dolphin was calculated.
[1] H. Tanaka, G. Li, Y. Uchida, M. Nakamura, T. Ikeda, and H. Liu, "Measurement of time-varying kinematics of a dolphin in burst accelerating swimming," PLOS ONE, vol. 14, e0210860, 2019. https://doi.org/10.1371/journal.pone.0210860
Flexible thin-film wings with self-organized micro wrinkles
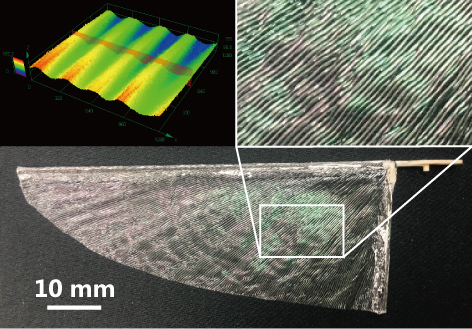
Aiming to create artificial wings possessing elasticity like a bird feather, we developed a new fabrication method in which periodic micro wrinkles are created on a thin polymer film for the wing membrane. Due to the corrugated cross-sectional shape of the wrinkles, the flexural stiffness of the wrinkles film increased by the magnitude of 100, and the tensile stiffness decreased by the magnitude of 0.01.
The micro wrinkles were formed on an elastomeric substrate deposited with a thin polymer layer by compressing the substrate (i.e. self-organization). This wrinkled substrate was used as a mold for the wrinkled wing film which was formed by another deposition process.
We tested the wrinkled wings with a tethered flapping mechanism. It is found that the wrinkles parallel to the wing chord prevents a flutter near the trailing edge and increased the thrust.
[1] H. Tanaka, H. Okada, Y. Shimasue, and H. Liu, "Flexible flapping wings with self-organized microwrinkles," Bioinspiration & Biomimetics, vol. 10, 046005, 2015.
Corrugated 3-D wing model based on a hoverfly and the passive feathering
[1] H. Tanaka, J. P. Whitney, and R. J. Wood, "Effect of flexural and torsional wing flexibility on lift generation in hoverfly flight," Integrative and Comparative Biology, vol. 51, pp. 142-150, 2011.
[2] H. Tanaka and R. J. Wood, "Fabrication of corrugated artificial insect wings using laser micromachined molds," Journal of Micromechanics and Microengineering, vol. 20, p. 075008, 2010.
Artificial butterfly with MEMS wing veins
[1] H. Tanaka and I. Shimoyama, "Forward flight of swallowtail butterfly with simple flapping motion," Bioinspiration & Biomimetics, vol. 5, 026003, 2010.
[2] H. Tanaka, K. Matsumoto, and I. Shimoyama, "Fabrication of a three-dimensional insect-wing model by micromolding of thermosetting resin with a thin elastmeric mold," Journal of Micromechanics and Microengineering, vol. 17, pp. 2485-2490, 2007.