Research
飛行の研究
ハチドリ型羽ばたき飛行体の開発
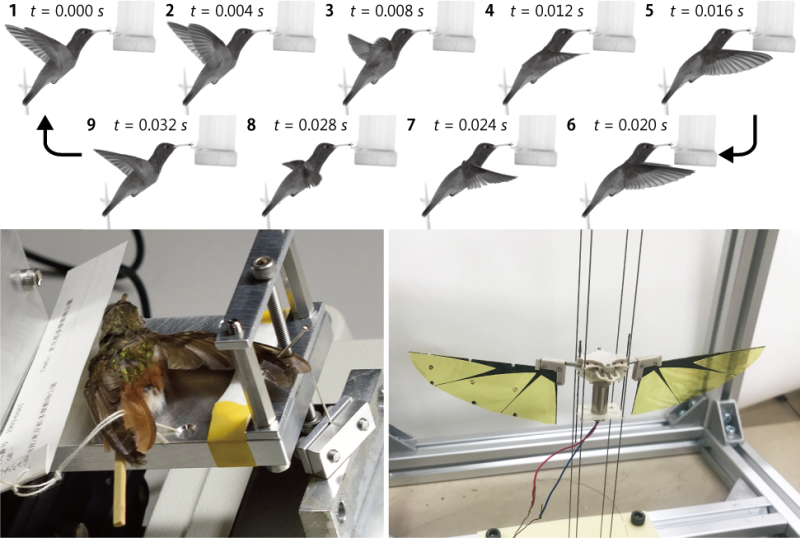
ハチドリや昆虫などの小さな飛翔生物は、柔軟な翼を大きな迎え角で羽ばたかせて飛行する。そのため回転翼機よりも翼の運動速度が遅くなり、静穏性や衝突時の安全性に優れている。さらに主翼の運動自由度が大きいため、空気力を大きく変化することが可能で機動性に優れる。こうした特徴を規範として、柔軟な翼を備える小型かつ安全で高機動なハチドリ型羽ばたき飛行体を研究している。
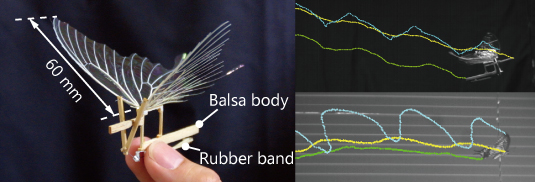
これまでにチャムネエメラルドハチドリのホバリング飛行を4台の高速度カメラで同期撮影し、翼運動と翼変形を3次元的に計測した[1]。その計測結果に基づいて、同ハチドリと同じ質量、同じ羽ばたき周波数、同じ羽ばたき振幅を1自由度の電動羽ばたき機構で実現し、垂直なガイドワイヤに沿った離陸を実現した。飛行制御の実現に向けて、翼運動のフィードバック制御の研究も行っている[2]。
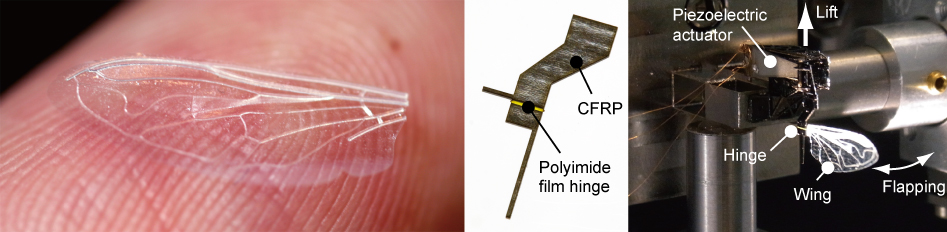
特に、風切羽の曲げ弾性に着目している。山階鳥類研究所と共同で、チャムネエメラルドハチドリの標本の風切羽の静的曲げ試験を行った。その結果に基づき、炭素繊維強化樹脂板とポリイミドフィルムからなる人工翼を設計して紫外線レーザ加工機を用いて製作した。羽の曲げ剛性の模倣によって、消費電力はそのままに平均揚力は大きく増加した[3]。最近は、3Dプリンタによる製作を実現し、ねじれやすい前縁の構造を組み込んだ[4]。
[1] M. Maeda, T. Nakata, I. Kitamura, H. Tanaka, and H. Liu, "Quantifying the dynamic wing morphing of hovering hummingbird," Royal Society Open Science, vol. 4, 2017.
[2] J. Dang, H. You, and H. Tanaka, "An experimental study on attitude control of a tailless hummingbird-mimetic flapping-wing robot with defective wings," Advanced Robotics, pp. 1-16, 2024, doi: 10.1080/01691864.2024.2391821.
[3] A. Kawahara, M. Aizawa, T. Yamasaki, and H. Tanaka, "Fabrication of a Hummingbird-mimetic Flexible Flapping Wings " in IEEE 30th 2019 International Symposium on Micro-NanoMechatronics and Human Science (IEEE MHS 2019), Nagoya University, Nagoya, Japan, December 1-4 2019, pp. 138-140.
[4] T. Fujii, J. Dang, and H. Tanaka, "Hummingbird-Bat Hybrid Wing by 3-D Printing," in 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, May 29–June 2 2023, pp. 3404–3410, doi: 10.1109/ICRA48891.2023.10160819.
遊泳の研究
ペンギンの羽ばたき遊泳メカニズムの解明と水中ドローン応用
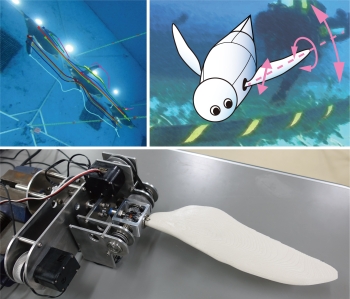
ペンギンは水中遊泳に適応進化した鳥類であり、翼の羽ばたきによって水中を俊敏に遊泳する。その翼運動や遊泳機動の詳細はほとんど明らかになっていない。本研究では、長崎ペンギン水族館の協力の下、多数の水中カメラを用いてペンギンの遊泳運動を撮影し、3次元運動解析を行って遊泳機動の流体力学的なメカニズムを調べている[1, 2]。さらに、ペンギンの3次元翼運動を模倣できる電動羽ばたき機構を考案した[3]。回流水槽中で羽ばたかせて力計測を行い、推力の大きさと方向の制御や翼形状による性能変化を研究している[4, 5]。将来的には、ペンギンを規範としたロボットによって遊泳メカニズムを実証し、俊敏で安全なペンギン模倣型の羽ばたき翼水中ドローンの開発を目指している。
[1] N. Harada and H. Tanaka, "Kinematic and hydrodynamic analyses of turning manoeuvres in penguins: body banking and wing upstroke generate centripetal force," J. Exp. Biol., vol. 225, no. 24, 2022, doi: 10.1242/jeb.244124.
[2] Natsuki Harada, Takuma Oura, Masateru Maeda, Yayi Shen, Dale M. Kikuchi, and Hiroto Tanaka, "Kinematics and hydrodynamics analyses of swimming penguins: wing bending improves propulsion performance," Vol. 224 (21), jeb242140, 2021, DOI: 10.1242/jeb.242140.
[3] 特願2018-184512, 特開2020-050315(機構の詳細は "JST 東京工業大学 技術説明会 2019" 説明スライドをご参照ください)
[4] Y. Shen and H. Tanaka, "Experimental analysis of the sweepback angle effect on the thrust generation of a robotic penguin wing," Bioinspiration & Biomimetics, vol. 18, no. 2, 026007, 2023, doi: 10.1088/1748-3190/acb521.
[5] Yayi Shen, Natsuki Harada, Sho Katagiri, and Hiroto Tanaka, "Biomimetic Realization of a Robotic Penguin Wing: Design and Thrust Characteristics," IEEE/ASME Transactions on Mechatronics, Vol. 26, Issue 5, Pp. 2350-2361, 2020, doi: 10.1109/TMECH.2020.3038224.
東工大ニュース:ペンギンが羽ばたいて旋回する遊泳メカニズムを解明 腹を内側に向け、翼の打ち上げで曲がる(2023年1月31日)
東工大ニュース: ペンギンが翼をしなやかに変形させ、効率よく泳ぐメカニズムを解明(2021年11月4日)
生物模倣リブレットによる流体抵抗低減
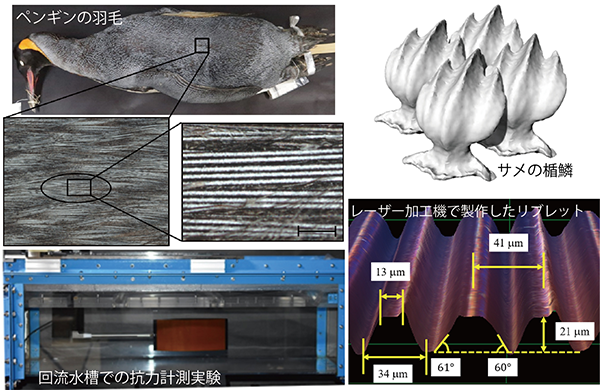
リブレットとは、乱流摩擦抵抗を低減する微細な列状突起の集合である。当研究室では、サメの鱗やペンギンの羽毛の形態に基づいた、流速・流向の変化にロバストな生物模倣リブレットを研究している。ホホジロザメの鱗の形状を詳細に計測し、鱗の突起の間隔と遊泳速度の関係を明らかにした[1]。サメの鱗の模倣リブレットの製作には、株式会社リコーと共同で,紫外線硬化樹脂のインクジェット印刷による立体造形「2.5D印刷」を応用した[2, 3]。ペンギンの羽毛の模倣リブレットの製作は、紫外線レーザースキャンによりフィルムを溝加工して実現した[4]。流体抵抗低減率は、回流水槽での抗力計測実験で評価している。
[1] S. Sayama, M. Natsuhara, G. Shinohara, M. Maeda, and H. Tanaka, "Three-dimensional shape of natural riblets in the white shark: relationship between the denticle morphology and swimming speed of sharks," Journal of The Royal Society Interface, vol. 21, no. 217, 20240063, 2024, doi: doi:10.1098/rsif.2024.0063.
[2] S. Sayama, K. Kato, M. Katsuki, Y. Kawashima, T. Kamei, M. Natsuhara, H. Tanaka, "Shark-inspired high-low alternating riblets by inkjet printing of UV-curable ink," in 75th Annual Meeting of the APS Division of Fluid Dynamics (APS DFD 2022), Indianapolis, IN, USA, November 22 2022, U17.01.
[3] 佐山将太朗, 加藤弘一, 香月政徳, 川嶋保宏, 亀井稔人, 田中博人, "ホホジロザメ(Carcharodon Carcharias)の楯鱗を模倣したリブレットの流速の変化に対するロバスト性," オンライン, 2020, OS05-02.
[4] R. Saito, T. Yamasaki, and H. Tanaka, "Fluid drag reduction by penguin-mimetic laser-ablated riblets with yaw angles," Bioinspiration & Biomimetics, vol. 17, no. 5, 056010, doi: 10.1088/1748-3190/ac7f71.
東工大ニュース: ホホジロザメの鱗の突起列は高速と低速の両方に適応–古代巨大ザメ・メガロドンの遊泳速度の推定も可能に(2024年8月2日)
東工大ニュース: ペンギンの体表は流体摩擦抵抗を低減(2022年8月24日)
共同研究: 株式会社リコー(2.5D印刷)
協力: 国立科学博物館(サメの形態計測); 株式会社島津製作所(サメ楯鱗のマイクロX線CT); 山階鳥類研究所および長崎ペンギン水族館(ペンギンの羽毛の形態計測)
過去の研究
カマイルカの最大加速遊泳時の出力推定
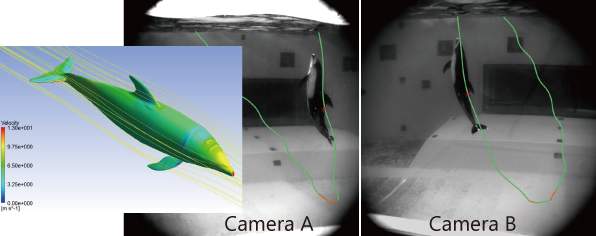
水族館にてカマイルカの垂直ジャンプ直前の加速遊泳を2台の高速度ビデオカメラで撮影し、3次元運動解析を行って最大加速遊泳時の出力推定した。イルカに働く流体抵抗は、イルカの3次元形状計測にもとづいた流体数値計算によって求めた。
[1] H. Tanaka, G. Li, Y. Uchida, M. Nakamura, T. Ikeda, and H. Liu, "Measurement of time-varying kinematics of a dolphin in burst accelerating swimming," PLOS ONE, vol. 14, e0210860, 2019. https://doi.org/10.1371/journal.pone.0210860
自己組織化微小シワを持つ柔軟フィルム翼
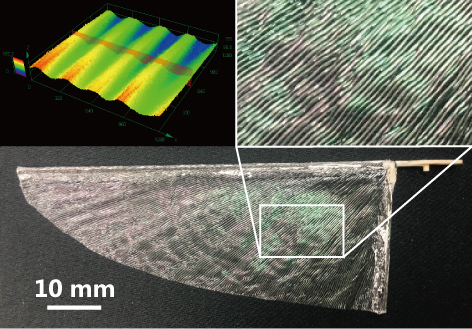
鳥の羽根のようにしなやかな柔軟性を持つ人工翼を目指して、フィルム翼面に微小なシワを規則的に配向させる製作方法を開発した。シワによる波状の断面形状によって、フィルムの曲げ剛性は 100 倍のオーダで大きくなり、引張剛性は 0.01 倍のオーダで小さくなる。
シワの生成方法として、薄膜/柔軟基板の2層構造を圧縮すると表面に規則的なシワが現れるという自己組織化現象を利用した。生成したシワを原型に用いて、犠牲層を介してパリレン薄膜を成膜し、離型するとシワ形状を転写されたパリレンフィルムが得られる。
このフィルム翼を羽ばたき翼に適用すると、シワの配向によって翼変形と推力が変化した。前縁が直線の楕円翼において、前縁に垂直にシワを配向すると、平行に配向させた場合やシワが無い場合に比べて、翼後縁部の過剰な変形が抑制され、推力が大きく向上した。
[1] H. Tanaka, H. Okada, Y. Shimasue, and H. Liu, "Flexible flapping wings with self-organized microwrinkles," Bioinspiration & Biomimetics, vol. 10, 046005, 2015.
[2] 田中博人, "第 10 章 飛行生物の翼を規範とした自己組織化微小シワを有するポリマーフィルム," in インスツルメンテーションの視点から見たバイオミメティクス~バイオミメティクス研究及び製品開発の動向と今後の展望~, 監修: 下村政嗣, シーエムシー・リサーチ, 2016, pp. 211-223.
三角波状断面を持つ 3-D ハナアブ翼モデルと受動的フェザリング
[1] H. Tanaka, J. P. Whitney, and R. J. Wood, "Effect of flexural and torsional wing flexibility on lift generation in hoverfly flight," Integrative and Comparative Biology, vol. 51, pp. 142-150, 2011.
[2] H. Tanaka and R. J. Wood, "Fabrication of corrugated artificial insect wings using laser micromachined molds," Journal of Micromechanics and Microengineering, vol. 20, p. 075008, 2010.
MEMS翅脈を持つチョウ型羽ばたき飛行機
[1] H. Tanaka and I. Shimoyama, "Forward flight of swallowtail butterfly with simple flapping motion," Bioinspiration & Biomimetics, vol. 5, 026003, 2010.
[2] H. Tanaka, K. Matsumoto, and I. Shimoyama, "Fabrication of a three-dimensional insect-wing model by micromolding of thermosetting resin with a thin elastmeric mold," Journal of Micromechanics and Microengineering, vol. 17, pp. 2485-2490, 2007.
2023年度JKA補助事業(競輪)の支援を受けた研究成果
・S. Sayama, M. Natsuhara, G. Shinohara, M. Maeda, and H. Tanaka, "Three-dimensional shape of natural riblets in the white shark: relationship between the denticle morphology and swimming speed of sharks," Journal of The Royal Society Interface, vol. 21, no. 217, 20240063, 2024, doi:10.1098/rsif.2024.0063.
・下岡大樹, 加古川篤, 田中博人, "水没型ギヤードサーボモータを用いたペンギン模倣遊泳ロボットの水中直進遊泳に関する研究," in ロボティクス・メカトロニクス講演会2024, 栃木県宇都宮市ライトキューブ宇都宮, 5月29日–6月1日 2024, 2P2-L01.
・高倉一之進, 野島大貴, 内山幸, 田中博人, "羽ばたき推進するフンボルトペンギンの翼の曲げ変形とねじれ変形および推進効率," in 第48回エアロ・アクアバイオメカニズム学会講演会, 東京工業大学, 2024, pp. 11–12.